TWOJA PRZEGLĄDARKA JEST NIEAKTUALNA.
Wykryliśmy, że używasz nieaktualnej przeglądarki, przez co nasz serwis może dla Ciebie działać niepoprawnie. Zalecamy aktualizację lub przejście na inną przeglądarkę.
Data: 16.03.2017 Kategoria: aktywność studencka
W Kole Naukowym Pojazdów Niekonwencjonalnych Off-Road trwają prace nad nowym łazikiem marsjańskim, który latem wystartuje w zawodach w USA. Pojazd ma już nazwę – ScorpioX – a konkretnych kształtów nabierze do końca kwietnia. Wtedy też zaczną się jego testy
 Członkowie koła – jak co roku o tej porze – starają się właśnie o zakwalifikowanie do zawodów University Rover Challenge. To rywalizacja studenckich analogów łazików z całego świata, rozgrywana na pustyni w stanie Utah, obok ośrodka Mars Desert Research Station , czyli symulowanej bazy marsjańskiej.
Członkowie koła – jak co roku o tej porze – starają się właśnie o zakwalifikowanie do zawodów University Rover Challenge. To rywalizacja studenckich analogów łazików z całego świata, rozgrywana na pustyni w stanie Utah, obok ośrodka Mars Desert Research Station , czyli symulowanej bazy marsjańskiej.
Na początku marca studenci wysłali ostateczną dokumentację konstrukcji swojego łazika oraz materiał wideo pokazujący pojazd. Na tej podstawie spośród wszystkich zgłoszeń sędziowie zawodów wybiorą 30 zespołów, które w pierwszy weekend czerwca zmierzą się z pięcioma wymagającymi zadaniami.
Ich łaziki mają pobrać próbkę gruntu do analizy, zebrać narzędzia umieszczone w wyznaczonych punktach i zawieźć je „astronautom”, samodzielnie pokonać trasę, zaliczając w odpowiedniej kolejności umieszczone na niej bramki, zatankować pojazd z pustym bakiem i włączyć wybrane przyciski na specjalnym panelu .
 ScorpioX powstanie do końca kwietnia. Będzie wyższy od poprzednich łazików konstruowanych przez Koło Naukowe Pojazdów Niekonwencjonalnych Off-Road , dzięki zwiększonemu prześwitowi (czyli wyższemu zawieszeniu). Studenci spodziewają się też, że będzie ważył więcej. Musi jednak zmieścić się w masie 50 kg, bo taki jest wymóg regulaminowy zawodów.
ScorpioX powstanie do końca kwietnia. Będzie wyższy od poprzednich łazików konstruowanych przez Koło Naukowe Pojazdów Niekonwencjonalnych Off-Road , dzięki zwiększonemu prześwitowi (czyli wyższemu zawieszeniu). Studenci spodziewają się też, że będzie ważył więcej. Musi jednak zmieścić się w masie 50 kg, bo taki jest wymóg regulaminowy zawodów.
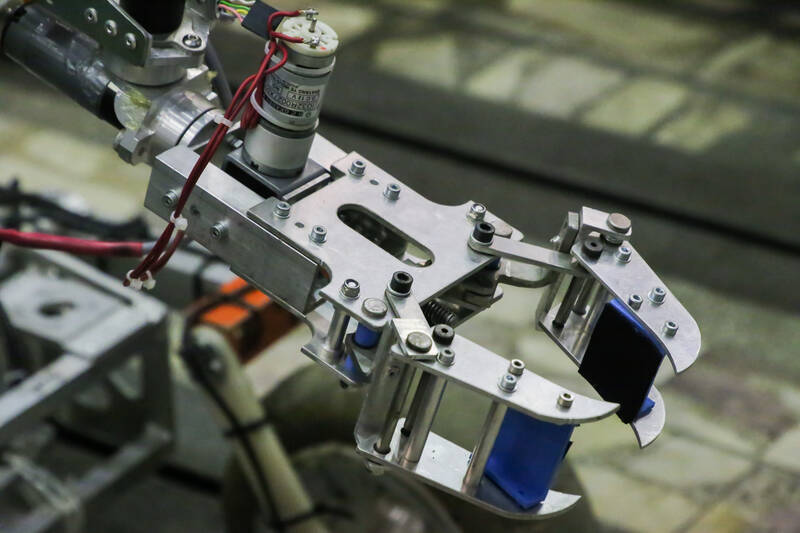
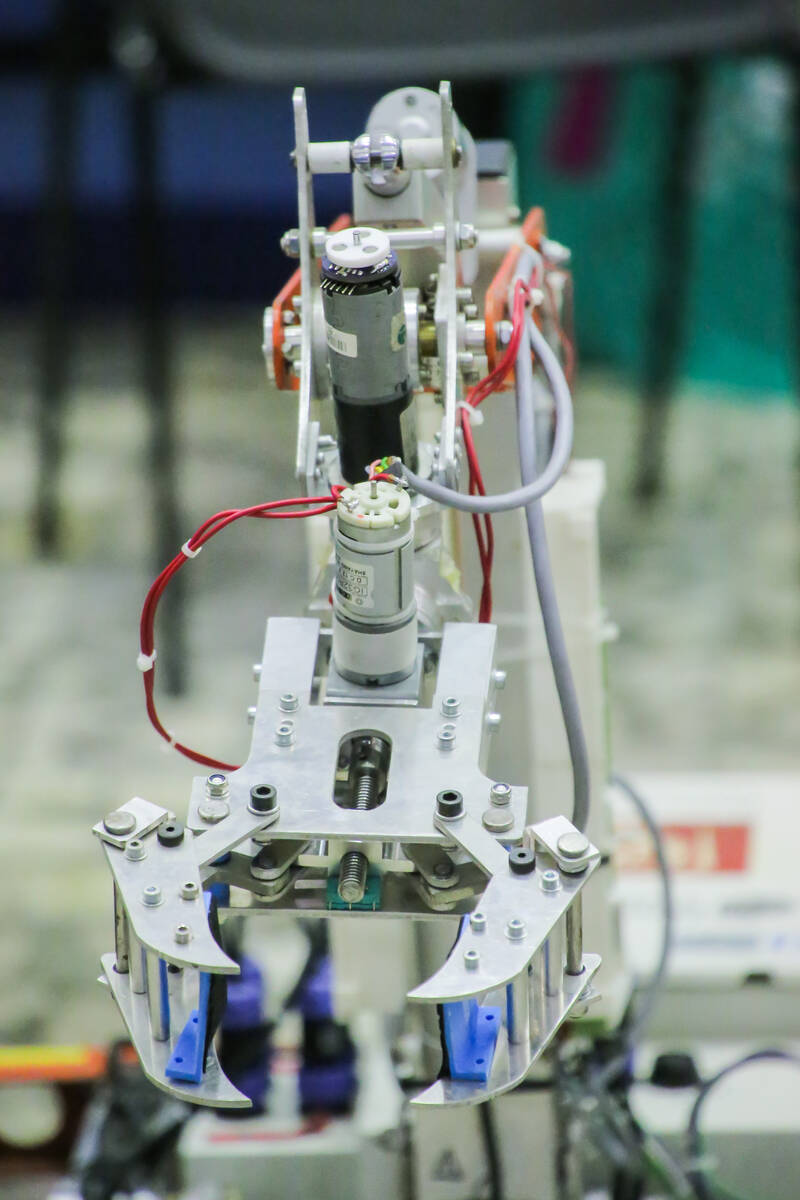
- Budujemy ScorpioX od podstaw, ale korzystając z rozwiązań sprawdzonych w naszych poprzednich łazikach – opowiada Aleksander Dziopa, wiceprezes koła. – Najbardziej zmieni się manipulator, który całkowicie przeprojektowaliśmy. Napisaliśmy bowiem program, który po wprowadzeniu do niego takich zmiennych jak długość ramienia manipulatora i kątów, w jakich może się poruszać, pokazał nam szczegółowe dane dotyczące zasięgu manipulatora. Uświadomiło nam to, że potrzebujemy większych zakresów kątowych w pierwszej parze obrotowej, a w konsekwencji – musimy zmienić system poruszania się tą pierwszą osią. Dlatego zamieniliśmy siłownik na przekładnię ślimakową z silnikiem szczotkowym. Sprawiło to, że nasz manipulator ma nieograniczony kąt obrotu.
 Pozostałe zmiany nie będą szczególnie widoczne dla postronnych obserwatorów. Studenci postanowili m.in. wzmocnić jeden układ zawieszenia (bo w ubiegłorocznym łaziku uległ zniszczeniu w czasie zawodów) oraz zmienić ramę łazika, w której montowane są elektroniczne układy.
Pozostałe zmiany nie będą szczególnie widoczne dla postronnych obserwatorów. Studenci postanowili m.in. wzmocnić jeden układ zawieszenia (bo w ubiegłorocznym łaziku uległ zniszczeniu w czasie zawodów) oraz zmienić ramę łazika, w której montowane są elektroniczne układy.
ScorpioX powstanie głównie z aluminium oraz kilku elementów ze stali i poliamidu. Podobnie jak jego poprzednicy będzie miał koła z Cordury – bardzo wytrzymałego materiału, wykorzystywanego zwykle w produkcji plecaków turystycznych czy ubrań dla motocyklistów.
- Koła są jednak szyte na nowo, bo poprzednie używaliśmy przez trzy lata i czas już na ich wymianę – opowiada Aleksander. – Tym razem nie chcemy ich jednak wypełniać granulatem styropianowym, bo zbyt szybko się zbijał. Zastąpimy go pianką, podobną do gąbki, z której są robione materace. Taka pianka po odkształceniu od razu wraca do swojego pierwotnego kształtu, więc powinna sprawdzić się w kołach łazika. Na razie testowaliśmy to rozwiązanie w jednym z kół, a gdy zbudujemy łazika, będziemy to sprawdzać we wszystkich.
Elektronicy pracujący w zespole zmienili z kolei mikrokontrolery i wprowadzili nową magistralę komunikacyjną (CAN). – Zastosowaliśmy też modułową konstrukcję, co bardzo ułatwiło nam projektowanie elektroniki łazika – opowiada Karol Kapera . – Nowe są również sensory do pomiaru stężenia gazów, temperatury, wilgotności i promieniowania, a obecnie jesteśmy w trakcie testów nowego spektrometru do analizy próbek gleby.
W tym roku w jednym z zadań organizatorzy zawodów postanowili znacząco podnieść poprzeczkę. Chodzi o misję, w której łazik ma pokonać trasę z zaznaczonymi bramkami. W poprzednich latach studenckie zespoły mogły sterować swoimi łazikami, korzystając z obrazu z zainstalowanych na pojeździe kamer. Tym razem przejazd łazika ma być autonomiczny. – Dlatego ScorpioX będzie miał laserowy radar, który kręcąc się, będzie omiatał wiązką laserową swoje otoczenie i na tej postawie tworzył chmurę punktów, a następnie trójwymiarowy obraz miejsc przed nim. W ten sposób będzie „wiedział”, jak jechać – tłumaczy Aleksander. – Każdy z zespołów dostanie też koordynaty GPS bramek. System GPS będzie tam jednak działał z dokładnością zaledwie 5-6 metrów. Stąd też koordynaty mają pomóc łazikowi w nakierowaniu się na bramki, ale już do skalibrowania przejazdu przez poszczególne bramki konieczny jest radar laserowy.
 Po ubiegłorocznych, nie najlepszych dla zespołu startach w University Rover Challenge (drugie miejsce w finale B, nazywanym Phobos) i European Rover Challenge (poza podium), zespół pracujący nad łazikiem przeszedł spore zmiany. Po rekrutacji dołączyło do niego wiele nowych osób, a samo koło naukowe stało się jednym z pięciu kół strategicznych Politechniki Wrocławskiej. – Dzięki temu spokojnie realizujemy zamówienia i tworzymy już pierwsze elementy łazika, podczas gdy w ubiegłym roku w tym samym czasie czekaliśmy jeszcze na decyzje o finansach zespołu – opowiada Aleksander. – Dlatego stawiamy sobie śmiałe cele w tym roku. Jesteśmy pewni, że latem będziemy mogli powalczyć o podium zawodów.
Po ubiegłorocznych, nie najlepszych dla zespołu startach w University Rover Challenge (drugie miejsce w finale B, nazywanym Phobos) i European Rover Challenge (poza podium), zespół pracujący nad łazikiem przeszedł spore zmiany. Po rekrutacji dołączyło do niego wiele nowych osób, a samo koło naukowe stało się jednym z pięciu kół strategicznych Politechniki Wrocławskiej. – Dzięki temu spokojnie realizujemy zamówienia i tworzymy już pierwsze elementy łazika, podczas gdy w ubiegłym roku w tym samym czasie czekaliśmy jeszcze na decyzje o finansach zespołu – opowiada Aleksander. – Dlatego stawiamy sobie śmiałe cele w tym roku. Jesteśmy pewni, że latem będziemy mogli powalczyć o podium zawodów.
Zespół obecnie tworzy ponad 20 osób. To głównie studenci z Wydziałów: Mechanicznego i Elektroniki, a także Elektrycznego oraz Informatyki i Zarządzania. W grupie pracuje również student chemii z Uniwersytetu Jagiellońskiego (odpowiada za przygotowanie łazika do zbadania pobranej próbki gleby), studentka Uniwersytetu SWPS i studentka University College London.
Koło Naukowe Pojazdów Niekonwencjonalnych Off-Road działa przy Katedrze Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych na Wydziale Mechanicznym Politechniki Wrocławskiej. Jego członkowie mają na swoim koncie kilka sukcesów w startach w University Rover Challenge. W 2013 r. przywieźli z USA drugie miejsce, a w 2015 r. – trzecie.
Udział studentów PWr w międzynarodowej rywalizacji jest możliwy nie tylko dzięki wsparciu uczelni, ale także sponsorów – firm: Lokum Deweloper, Igus, SMS Kredyt Holding, WObit, SDA.
Lucyna Róg











Nasze strony internetowe i oparte na nich usługi używają informacji zapisanych w plikach cookies. Korzystając z serwisu wyrażasz zgodę na używanie plików cookies zgodnie z aktualnymi ustawieniami przeglądarki, które możesz zmienić w dowolnej chwili. Ochrona danych osobowych »