TWOJA PRZEGLĄDARKA JEST NIEAKTUALNA.
Wykryliśmy, że używasz nieaktualnej przeglądarki, przez co nasz serwis może dla Ciebie działać niepoprawnie. Zalecamy aktualizację lub przejście na inną przeglądarkę.
Data: 22.11.2017 Kategoria: konkursy/stypendia, nauka/badania/innowacje, życie uczelni
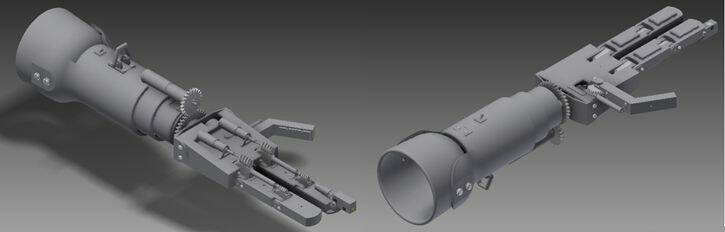
Karolina Karolak, tegoroczna absolwentka inżynierii biomedycznej na Wydziale Mechanicznym zdobyła nagrodę pierwszego stopnia w 37. Konkursie Stowarzyszenia Inżynierów i Techników Mechaników Polskich na najlepsze prace dyplomowe. Zaprojektowała protezo-manipulator dla osób po częściowej amputacji ręki, który ułatwiłby ich pracę na stanowisku przemysłowym.
 W Ogólnopolskim Konkursie SIMP im. Profesora Romana Sobolskiego nagradzane są najlepsze prace dyplomowe z zakresu mechaniki i budowy maszyn. W jego 37. edycji pierwszą nagrodę przyznano Karolinie Karolak z Wydziału Mechanicznego PWr za pracę „Manipulator dla osób po częściowej amputacji kończyny górnej” napisaną pod kierunkiem dr inż. Ludomira Jankowskiego.
W Ogólnopolskim Konkursie SIMP im. Profesora Romana Sobolskiego nagradzane są najlepsze prace dyplomowe z zakresu mechaniki i budowy maszyn. W jego 37. edycji pierwszą nagrodę przyznano Karolinie Karolak z Wydziału Mechanicznego PWr za pracę „Manipulator dla osób po częściowej amputacji kończyny górnej” napisaną pod kierunkiem dr inż. Ludomira Jankowskiego.
- Postanowiłam zaprojektować protezę przystosowaną do pracy w przemyśle, bo zauważyłam, że to nadal nisza na rynku – opowiada Karolina Karolak. – W dobie automatyzacji osoby z amputowanymi kończynami są niejako pomijane, a przecież urządzenia medyczne, jakimi są protezy, też mogą ulec częściowej automatyzacji, by usprawnić ich pracę na stanowisku przemysłowym. Dodatkowo osoby po częściowej amputacji kończyny górnej, które przed wypadkiem pracowały na takim stanowisku, po nim nie są w stanie wykonywać wszystkich czynności, bo ich protezy są dość ograniczone ruchowo. Do wyboru mają albo takie, które mają realizować podstawowe funkcje ręki i zastępować ją pod względem estetycznym, ale nie są przystosowane do specjalistycznej pracy, albo protezy pełniące funkcję narzędzia do prac warsztatowych, które jednak nie pozwalają wykonywać zwykłych czynności codziennego życia. Mają bowiem chwytaki do wymiany końcówek narzędziowych, ale nie można nimi wykonywać chwytów charakterystycznych dla ludzkiej dłoni. Dlatego w swojej pracy zajęłam się zaprojektowaniem protezo-manipulatora, który połączy obie te funkcjonalności, będzie taką „ręką inspektora Gadżeta” – śmieje się Karolina. – Oczywiście na początku miałam masę pomysłów na to, co taka proteza mogłaby robić, ale im bardziej zagłębiałam się w różne rozwiązania, tym więcej problemów się przede mną piętrzyło. Ostatecznie udało mi się zrealizować wszystkie założenia funkcjonalne i ogromnie się cieszę, że projekt został zauważony i nagrodzony przez komisję konkursową.
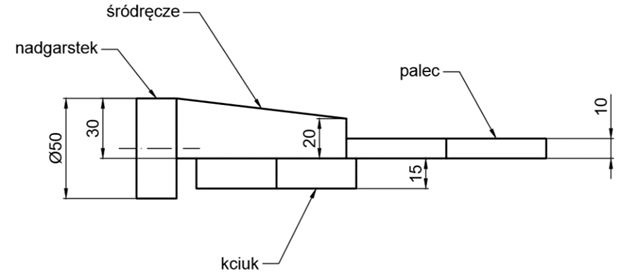
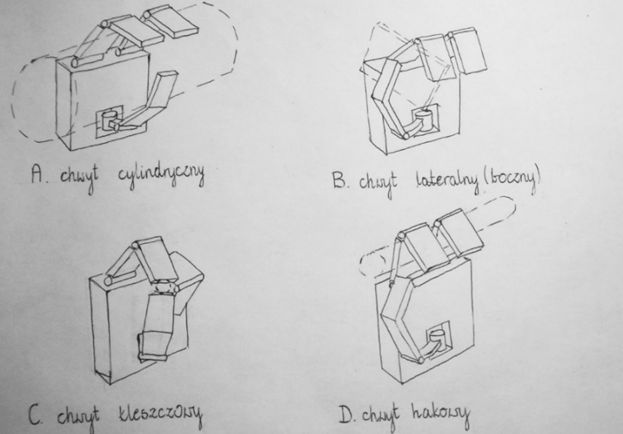
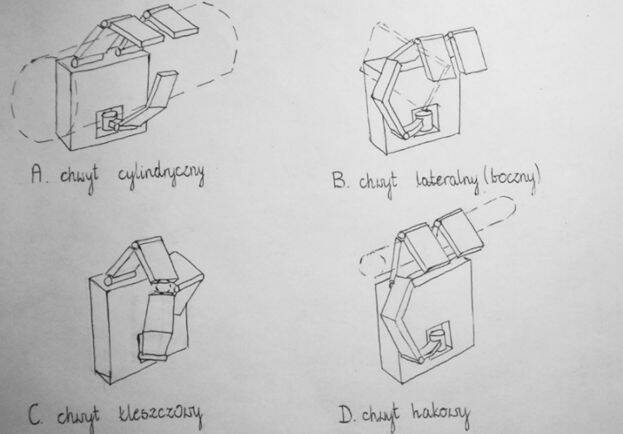
 Karolina zaprojektowała protezo-manipulator z myślą o osobach po amputacji ręki poniżej stawu łokciowego (tzw. proteza transradialna). Wykonuje on cztery rodzaje chwytów – cylindryczny, hakowy, lateralny (boczny) i dłoniowy-kleszczowy. Proteza ma tylko trzy palce, bo – jak podkreśla projektantka – to wystarczająca liczba zapewniająca sprawne i intuicyjne wykonywanie założonych chwytów.
Karolina zaprojektowała protezo-manipulator z myślą o osobach po amputacji ręki poniżej stawu łokciowego (tzw. proteza transradialna). Wykonuje on cztery rodzaje chwytów – cylindryczny, hakowy, lateralny (boczny) i dłoniowy-kleszczowy. Proteza ma tylko trzy palce, bo – jak podkreśla projektantka – to wystarczająca liczba zapewniająca sprawne i intuicyjne wykonywanie założonych chwytów.
– Służyłaby tym, dla których liczą się przede wszystkim kwestie praktyczne, a estetyka jest na drugim miejscu – wyjaśnia Karolina. – Wcale nie jest tak, że wszystkie osoby, które chcą używać protez, chcą również by możliwie najdokładniej odwzorowywały one ludzką rękę. Każdy przypadek jest indywidualny, a wiele zależy od tego, czy ktoś urodził się bez ręki, czy też stracił ją w wypadku oraz jakie ma podejście do własnego ciała i jego obraz w swojej głowie. Realizując kurs „Człowiek i technika”, pisałam pracę na temat wpływu rodzaju i zaawansowania technicznego protezy na psychikę i komfort pacjenta. Zagłębiałam się w problem obrazu ciała, czyli schematu własnego ciała, jaki pacjent tworzy w swoim umyśle. Między innymi właśnie od rekonceptualizacji obrazu ciała po amputacji lub też jego formy od urodzenia zależy, czy pacjent zdecyduje się jedynie na estetyczne zamaskowanie braku kończyny, czy na zaawansowane technicznie funkcjonalne zastąpienie jej możliwości chwytnych. Niektórzy pacjenci decydują się na coś wystrzałowego, np. rękę Iron-Mana, ponieważ nie postrzegają braku kończyny jako czegoś koniecznego do zamaskowania lub wybierają protezę z hakiem, która jest bardzo intuicyjna w sterowaniu i świetnie zastępuje funkcje dłoni przy jednocześnie prostej konstrukcji.
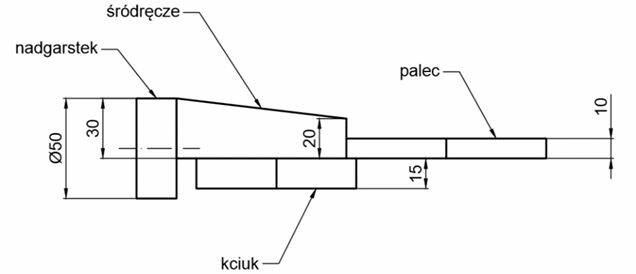
 Zaprojektowany przez absolwentkę PWr protezo-manipulator umożliwia wykonywanie pracy na stanowisku przemysłowym, wymagającej ciągłej, powtarzalnej manipulacji przedmiotami, także ze zróżnicowanym polem działania. Mogłyby korzystać z niego np. osoby pracujące w fabryce przy taśmie produkcyjnej, w dziale kontroli jakości i w innych miejscach. Bez problemu m.in. mieszałyby farby, przelewały ciecze z pojemników z uchwytem lub bez, a także przenosiły, przesuwały i odstawiały z miejsca na miejsce różne obiekty o wielkości od 5 mm do 100 mm i masie do 500 g.
Zaprojektowany przez absolwentkę PWr protezo-manipulator umożliwia wykonywanie pracy na stanowisku przemysłowym, wymagającej ciągłej, powtarzalnej manipulacji przedmiotami, także ze zróżnicowanym polem działania. Mogłyby korzystać z niego np. osoby pracujące w fabryce przy taśmie produkcyjnej, w dziale kontroli jakości i w innych miejscach. Bez problemu m.in. mieszałyby farby, przelewały ciecze z pojemników z uchwytem lub bez, a także przenosiły, przesuwały i odstawiały z miejsca na miejsce różne obiekty o wielkości od 5 mm do 100 mm i masie do 500 g.
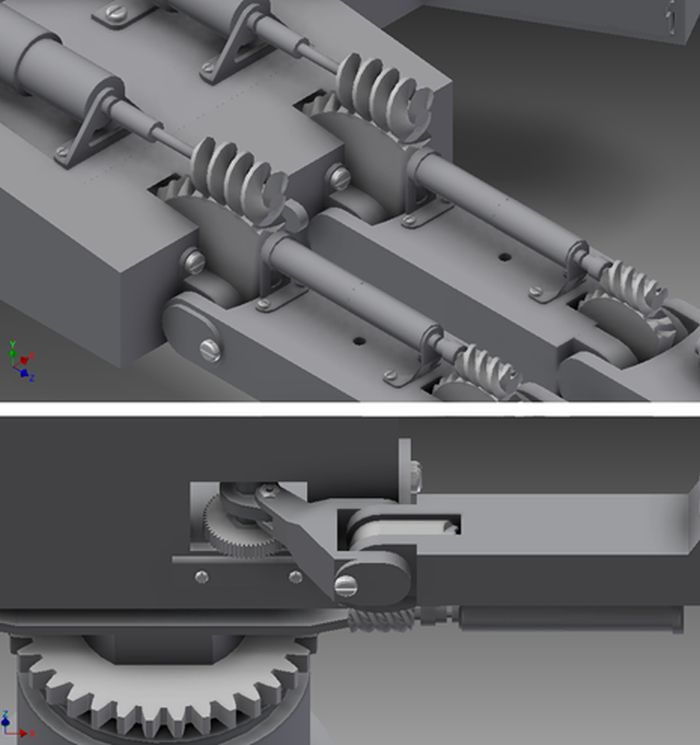
Pole pracy manipulatora poszerza mechanizm wysuwający rękaw protezy na odległość do 120 mm. Poza tym jej nadgarstek wielokrotnie obraca się w zakresie 360 stopni. – I jest to bardzo precyzyjny obrót. Dzięki temu proteza może służyć jako urządzenie wspomagające montaż, np. wkręcanie i wykręcanie różnych elementów takich jak nakrętki czy śruby albo po prostu trzymanie kubka i wylanie z niego zawartości – tłumaczy Karolina. – Wielofunkcyjność wielokrotnego obrotu w nadgarstku jest zagwarantowana dzięki szybkiemu montażowi i demontażowi końcówek narzędziowych w dłoni, bez konieczności demontażu całego mechanizmu chwytnego.
Proteza daje także możliwość przeprowadzania pomiarów różnych obiektów bez żadnych dodatkowych narzędzi. Ma bowiem czujnik ultradźwiękowy i wystarczy umieszczenie danego przedmiotu między palcem wskazującym a drugim palcem. Wynik pomiaru pokazywać się będzie na wyświetlaczu na rękawie protezy.
 Sterowanie protezo-manipulatorem jest mieszane - tzn. że jest sterowany za pomocą skurczu mięśni i elektrod dotykowych przetwarzających nacisk na sygnał elektryczny oraz ruchami ciała (co jest możliwe przy zastosowaniu mocowania protezy na uprzęży).
Sterowanie protezo-manipulatorem jest mieszane - tzn. że jest sterowany za pomocą skurczu mięśni i elektrod dotykowych przetwarzających nacisk na sygnał elektryczny oraz ruchami ciała (co jest możliwe przy zastosowaniu mocowania protezy na uprzęży).
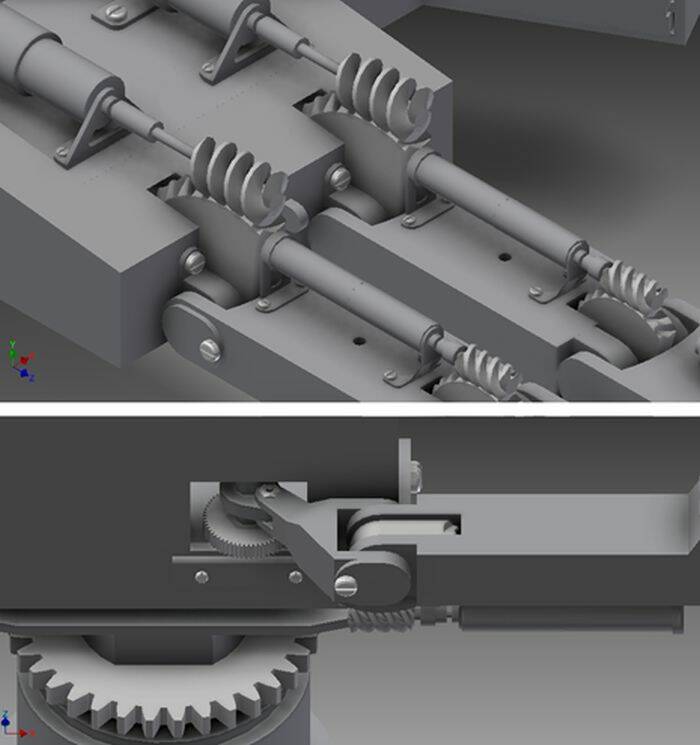
- Starałam się stosować rozwiązania przemysłowe w małej skali i to było najtrudniejsze w tym projekcie – opowiada Karolina. – To trochę tak, jakbym próbowała „upchnąć” manipulator prosto z fabryki w niewielkiej ręce – tłumaczy obrazowo absolwentka W10. – Dlatego musiałam zaprojektować maleńkie elementy konstrukcyjne i zastosować bardzo niewielkie wkręty. Inaczej proteza ważyłaby zbyt dużo i nie nadawałaby się na ośmiogodzinny dzień pracy.
Jak podkreśla w swojej pracy absolwentka PWr, masa protezy nie może zastępować masy utraconej części kończyny w stosunku 1:1. Wynika to z odczuwania protezy przez organizm jako obciążenia zewnętrznego, a nie części ciała – co można porównać np. do noszenia na ramieniu torby z laptopem. W związku z tym, mimo że ręka dorosłego mężczyzny ma masę około 10 kg, zastępująca ją proteza o masie przekraczającej 3,5 kg nie będzie mogła być użytkowana przez dłuższy czas ze względu na dyskomfort związany z takim obciążeniem ciała.
 Karolina Karolak na studiach pierwszego stopnia ukończyła mechatronikę – także na W10. Protetyką zaczęła się interesować w czasie studiów drugiego stopnia, gdy wyjechała w ramach programu Erasmus Plus do Reykjavik University. Uczestniczyła tam m.in. w wykładzie z biomechaniki i kursie z elektromiografii (badanie sygnałów mięśniowych) zakończonym projektem. W czasie zajęć zwiedziła również siedzibę firmy Össur specjalizującej się w protetyce nóg.
Karolina Karolak na studiach pierwszego stopnia ukończyła mechatronikę – także na W10. Protetyką zaczęła się interesować w czasie studiów drugiego stopnia, gdy wyjechała w ramach programu Erasmus Plus do Reykjavik University. Uczestniczyła tam m.in. w wykładzie z biomechaniki i kursie z elektromiografii (badanie sygnałów mięśniowych) zakończonym projektem. W czasie zajęć zwiedziła również siedzibę firmy Össur specjalizującej się w protetyce nóg.
– Dużo nauczyłam się także w czasie miesięcznej praktyki w głównym oddziale belgijskiej firmy Vigo-Ortho w Łodzi – opowiada. – Miałam tam okazję poznać od podstaw proces powstawania lejów protetycznych oraz protez i ortez. Modelowałam w gipsie bazy do produkcji lejów i różnych rodzajów ortez, zdejmowałam miary z pacjentów, pomagałam im przy wkładaniu i przymierzaniu ortez i protez i ich korygowaniu, oraz przy nauce poruszania się z użyciem tych urządzeń medycznych. To było cenne doświadczenie, a praca z pacjentem pomogła mi lepiej zrozumieć potrzeby osób po amputacjach.
Poza konkursem im. prof. Sobolskiego Karolina została także nominowana w konkursie na najlepszy dyplom Wydziału Mechanicznego oraz w konkursie na najlepszego absolwenta tego wydziału (ostatecznie znalazła się w Top 10 absolwentów drugiego stopnia). Obecnie pracuje w firmie zajmującej się urządzeniami medycznymi z zakresu protetyki słuchu, nie wyklucza jednak rozpoczęcia studiów doktoranckich w przyszłości.
Nagroda I stopnia
Karolina Karolak - praca „Manipulator dla osoby po częściowej amputacji kończyny górnej” wykonana pod kierunkiem dr. inż. Ludomira Jankowskiego
Nagroda II stopnia
Krystian Kisiel – praca „Opracowanie technologii lutowania miękkiego i twardego stopu aluminium 7075” wykonana pod kierunkiem prof. Zbigniewa Mirskiego
Nagroda III stopnia ex aequo
Natalia Szydło – praca „Wpływ warunków przejściowych procesu spawania laserowego na własności mechaniczne złącza” wykonaną pod kierunkiem dr. hab. Jacka Reinera ,prof. PWr
Jakub Andruszko – praca „Projekt urządzenia do szybkiego sprzęgania osprzętu roboczego elektrycznej maszyny wyburzeniowej” wykonana pod kierunkiem prof. Eugeniusza Rusińskiego
Wyróżnienie
Michał Krzysztoporski – praca „Zaprojektowanie, wykonanie prototypu oraz przeprowadzenie badań kompozytowego wału pędnego pojazdu” wykonana pod kierunkiem dr. hab. Wojciecha Błażejewskiego, prof. PWr
Nagroda specjalna oddziału wojewódzkiego SIMP we Wrocławiu
Łukasz Szczeciński – praca „System nadzoru i sterowania nawadniania upraw polowych deszczownią szpulową” wykonana pod kierunkiem dr. inż. Marcina Pawlaka
Lucyna Róg
Nasze strony internetowe i oparte na nich usługi używają informacji zapisanych w plikach cookies. Korzystając z serwisu wyrażasz zgodę na używanie plików cookies zgodnie z aktualnymi ustawieniami przeglądarki, które możesz zmienić w dowolnej chwili. Ochrona danych osobowych »