TWOJA PRZEGLĄDARKA JEST NIEAKTUALNA.
Wykryliśmy, że używasz nieaktualnej przeglądarki, przez co nasz serwis może dla Ciebie działać niepoprawnie. Zalecamy aktualizację lub przejście na inną przeglądarkę.
Data: 28.02.2018 Kategoria: aktualności ogólne, aktywność studencka, konkursy/stypendia
Studenci z Politechniki Wrocławskiej skonstruowali przystosowanego do jazdy w terenie autonomicznego robota potrafiącego omijać przeszkody i samodzielnie znajdującego drogę do celu. Ze swoim projektem startują w konkursie, w którym jedną z nagród jest wyjazd do Stanów Zjednoczonych
Robot o nazwie „Chrząszcz” jest urządzeniem klasy Robomagellan, czyli konstrukcją przypominającą autonomiczne samochody. Jego głównym zadaniem jest przemieszczanie się po określonym terenie i wyszukiwanie punktów docelowych. Musi przy tym rozpoznawać i omijać różnego rodzaju przeszkody – krawężniki, budynki, kamienie czy kosze na śmieci. Jeśli na jakąś natrafi, to wybiera najkrótszą drogę, by ją ominąć.
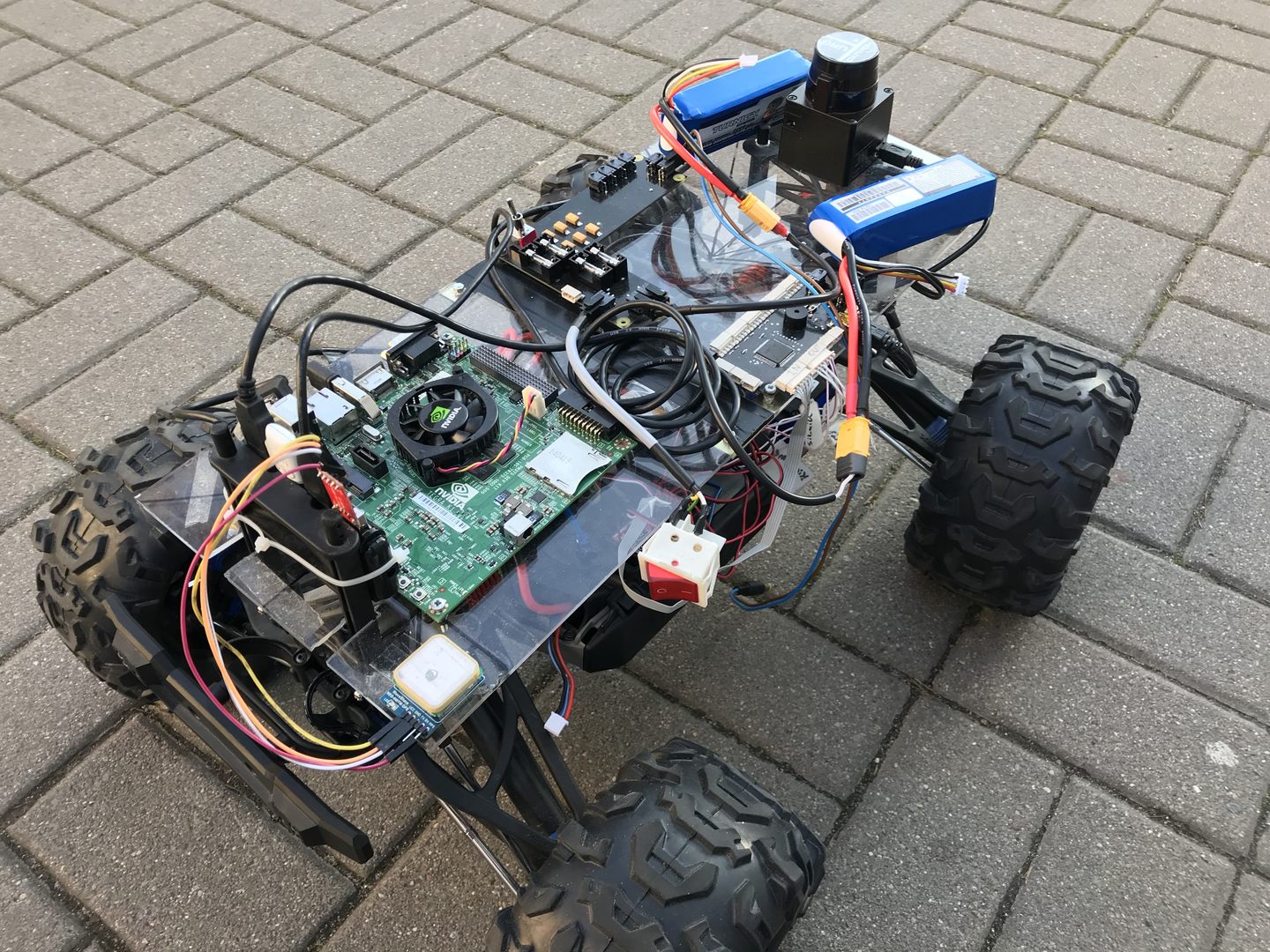
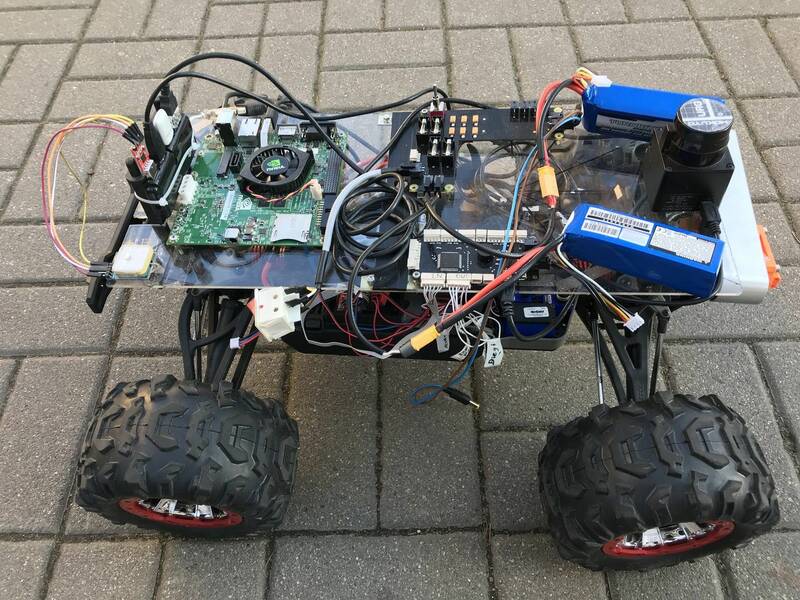
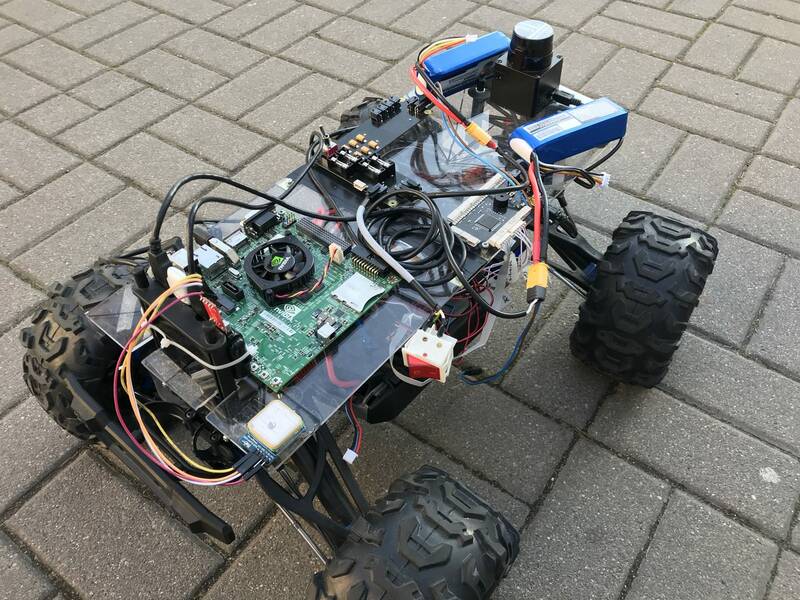
 – Robot ma ok. 50 cm długości i waży 6 kg. Został zbudowany na platformie zdalnie sterowanego samochodu, którą odpowiednio przerobiliśmy. Tak naprawdę niezmieniona została jedynie konstrukcja mechaniczna, układ jezdny i napęd, a całą elektronikę zbudowaliśmy od podstaw sami – mówi Mateusz Michalak, prezes Koła Naukowego Robotyków KoNaR.
– Robot ma ok. 50 cm długości i waży 6 kg. Został zbudowany na platformie zdalnie sterowanego samochodu, którą odpowiednio przerobiliśmy. Tak naprawdę niezmieniona została jedynie konstrukcja mechaniczna, układ jezdny i napęd, a całą elektronikę zbudowaliśmy od podstaw sami – mówi Mateusz Michalak, prezes Koła Naukowego Robotyków KoNaR.
Całym urządzeniem steruje komputer, a na platformie studenci zamontowali także m.in. kamerę stereowizyjną, odbiornik GPS oraz lidar, czyli urządzenie działające na podobnej zasadzie jak radar, ale wykorzystujące światło zamiast mikrofal.
– Do tego są tam jeszcze nasze trzy autorskie płytki z elektroniką. Pierwsza steruje zasilaniem, ponieważ mamy różne źródła i poziomy napięć, druga odbiera sygnały od komputera i steruje silnikami, a trzecia jest płytką typowo czujnikową i w tym momencie obsługuje przede wszystkim czujnik AHRS - żyroskop, akcelerometr i magnetometr w jednym. W przyszłości robot będzie też wyposażony w komplet sonarów, które są w stanie monitorować bliską przestrzeń wokół maszyny oraz zderzak wykrywający kontakt z przeszkodą – wyjaśnia student.
„Chrząszcz” jest także przystosowany do pokonywania różnego rodzaju przeszkód terenowych. Każde koło ma niezależne zawieszenie, blokowany dyferencjał z przodu i z tyłu oraz dwa biegi. Zmodyfikowane baterie wystarczają na ok. dwie godziny jazdy, co teoretycznie przekłada się na zasięg kilkudziesięciu kilometrów.
Jeden z pierwszych prototypów robota miał swoją premierę w maju 2017 r. podczas organizowanych na Politechnice Wrocławskiej zawodów RoboDrift. Wówczas była to jednak maszyna niedziałająca całkiem poprawnie, a młodzi konstruktorzy zamiast z trasą, którą mieli do pokonania, walczyli m.in. z pojawiającymi się zakłóceniami sygnałów.
– Teraz jest już dużo lepiej. Bardzo długo testowaliśmy wszystko na symulacjach, a teraz, gdy nowy prototyp został już zbudowany, sprawdzaliśmy jego możliwości najpierw w pomieszczeniach, a później na terenie kampusu. Jesteśmy bardzo pozytywnie zaskoczeni tym, jak dobrze działa opracowany przez nas algorytm – dodał Mateusz Michalak.
 Technologia przyszłości
Technologia przyszłościWarto podkreślić, że to pierwsza tego typu konstrukcja, nad którą pracują studenci z KoNaR-u. Dotychczas ich projekty obejmowały bowiem roboty poruszające się przede wszystkim w pomieszczeniach. Budując „Chrząszcza” musieli więc wziąć pod uwagę wiele nowych czynników np. zabezpieczenie przed warunkami pogodowymi.
– W kolejnej wersji robota elektronika będzie już na dwóch poziomach przykryta twardą i wytrzymującą przewrotki obudową. Chcemy do tego wykorzystać oryginalne elementy, które znajdowały się w wykorzystywanym przez nas modelu, ale konieczne będzie wycięcie dodatkowych otworów na kamery i inne elementy, którą muszą wystawać nad pojazd – tłumaczy młody konstruktor.
Rozwiązania zastosowane przez naszych studentów są wykorzystywane przy budowie samochodów autonomicznych oraz w testowanych obecnie robotach, które same muszą zlokalizować swoje położenie.
„Chrząszcz” powstaje na międzynarodowe zawody robotów, które pod koniec kwietnia odbędą się w Stanach Zjednoczonych, ale nasi studenci zgłosili go także do konkursu NVIDIA Jetson Developer Challenge. Rywalizują w nim różnego rodzaju konstrukcje z takich dziedzin jak np. robotyka, bezpieczeństwo i ochrona zdrowia, które muszą się opierać na platformie NVIDIA Jetson.
Najciekawsze projekty wybierze jury, ale w specjalnym głosowaniu przyznana zostanie także nagroda publiczności. Na projekt naszych studentów można głosować do 4 marca na stronie internetowej. Zwycięzcy konkursu otrzymają nagrody finansowe oraz sprzęt elektroniczny, a wszyscy finaliści pojadą na wycieczkę do Doliny Krzemowej.
Więcej informacji na profilu KN KoNaR na FB.
mic





Nasze strony internetowe i oparte na nich usługi używają informacji zapisanych w plikach cookies. Korzystając z serwisu wyrażasz zgodę na używanie plików cookies zgodnie z aktualnymi ustawieniami przeglądarki, które możesz zmienić w dowolnej chwili. Ochrona danych osobowych »