TWOJA PRZEGLĄDARKA JEST NIEAKTUALNA.
Wykryliśmy, że używasz nieaktualnej przeglądarki, przez co nasz serwis może dla Ciebie działać niepoprawnie. Zalecamy aktualizację lub przejście na inną przeglądarkę.
Data: 14.12.2017 Kategoria: aktualności ogólne, aktywność studencka, nauka/badania/innowacje
Studenci z Politechniki Wrocławskiej pracują nad podwodnym robotem, który może być wykorzystany m.in. do eksploracji różnego rodzaju akwenów czy inspekcji kadłubów statków. Ze swoją konstrukcją chcieliby także wystartować w międzynarodowych zawodach w USA
Pomysł na budowę łodzi zrodził się w Kole Naukowym Automatyki i Robotyki „Robocik” w ubiegłym roku. Po zakończeniu rekrutacji nowych członków władze koła zdecydowały, że rozpoczną realizację dużego projektu, który pozwoli także na start w międzynarodowych zawodach.
– Na Politechnice Wrocławskiej powstają już m.in. bolidy, łazik marsjański i różnego rodzaju drony, a my szukaliśmy dla siebie niszy i okazało się, że są nią roboty podwodne – mówi Mateusz Zimoch, wiceprezes ds. organizacyjnych.
 Do budowy robota nasi studenci przystąpili bez wcześniejszego doświadczenia, ale okazało się, że mogą skorzystać z pomocy Michała Biskupa, absolwenta PWr i byłego członka KN Robocik, który stworzył podwodnego drona Diveye wykorzystywanego do relacjonowania zawodów we freedivingu. – Jesteśmy z nim w kontakcie i cały czas wymieniamy się pomysłami i doświadczeniami – dodaje Zimoch.
Do budowy robota nasi studenci przystąpili bez wcześniejszego doświadczenia, ale okazało się, że mogą skorzystać z pomocy Michała Biskupa, absolwenta PWr i byłego członka KN Robocik, który stworzył podwodnego drona Diveye wykorzystywanego do relacjonowania zawodów we freedivingu. – Jesteśmy z nim w kontakcie i cały czas wymieniamy się pomysłami i doświadczeniami – dodaje Zimoch.
Młodzi konstruktorzy postanowili, że ich pierwszy model nie będzie zbyt rozbudowany – miał pływać i mieć zamontowaną kamerę, ale musiał przede wszystkim pozwolić na zdobywanie nowej wiedzy w opracowywaniu tego typu konstrukcji. – Projektowaliśmy go etapami. Skoro ma pływać, musi mieć silniki, jeśli ma się poruszać w różnych kierunkach, potrzebne są systemy sterowania, do tego wszystkiego konieczny jest system zasilania i oczywiście odpowiednia obudowa – opowiada Jakub Chmielewski, główny konstruktor robota.
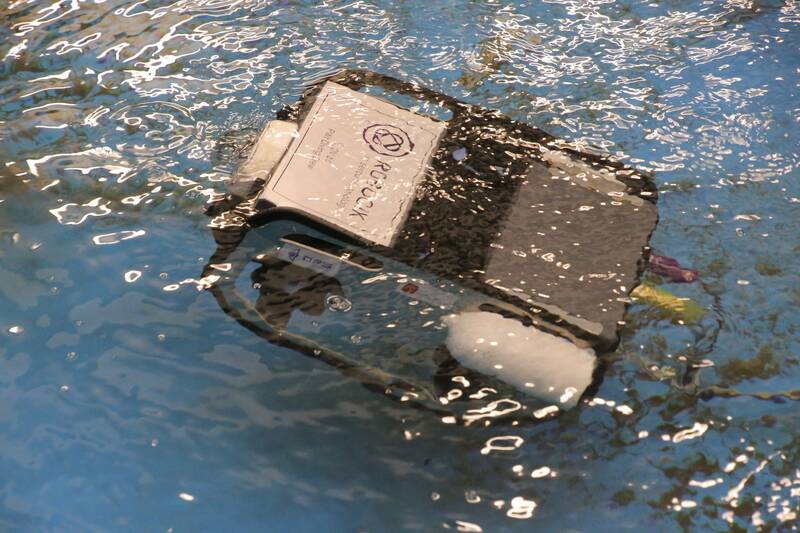
Po przygotowaniu modelu 3D zbudowano pierwszy prototyp, a w czerwcu ruszyły prace nad bardziej zaawansowaną konstrukcją. Model wykonany z kwasoodpornej aluminiowej blachy był gotowy w październiku. Studenci prezentowali go m.in. na Dniach Aktywności Studenckiej i na grudniowych zawodach Robotic Arena.
 – Łódź ma wymiary 50x30x40 cm i waży ok. 10 kg. Wyposażona jest m.in. w sześć silników, kamerę, światła LED, czujniki położenia i orientacji oraz czujnik temperatury zapobiegający przegrzaniu zasilacza. Sterować można nią za pomocą pada, kabel zasilający ma długość 30 m, a porusza się z prędkością ok. 5 m/s – wyliczał Chmielewski.
– Łódź ma wymiary 50x30x40 cm i waży ok. 10 kg. Wyposażona jest m.in. w sześć silników, kamerę, światła LED, czujniki położenia i orientacji oraz czujnik temperatury zapobiegający przegrzaniu zasilacza. Sterować można nią za pomocą pada, kabel zasilający ma długość 30 m, a porusza się z prędkością ok. 5 m/s – wyliczał Chmielewski.
Największym problemem w tego typu konstrukcjach jest uszczelnienie obudowy, bowiem nawet najmniejszy przeciek może doprowadzić do spięcia i uszkodzenia całej elektroniki. – W tym projekcie musimy przygotować układy elektroniczne o podobnym poziomie skomplikowania jak np. w łaziku marsjańskim, tylko dodatkowo trzeba jeszcze znaleźć sposób na zachowanie szczelności i odporności na ciśnienie panujące na różnych głębokościach – tłumaczy konstruktor.
Docelowo łódź może być wykorzystywana w eksploracji różnego rodzaju akwenów, ale też np. do inspekcji kadłubów statków. Obecnie nasi studenci sprawdzają swoją konstrukcję w basenie wioślarskim znajdującym się w budynku H-14. W planach mają już jednak wyjazd na testy do większych zbiorników np. do zalanego kamieniołomu w Sobótce o głębokości ok. 40 m.
Model będzie cały czas rozwijany i wykorzystywany do nauki dla nowych członków koła naukowego.
 Przed naszymi studentami jednak jeszcze większe wyzwanie – przygotowanie łodzi na zawody robotów podwodnych MATE Competition, które w czerwcu 2018 r. odbędą się w USA. Konstruktorzy muszą zbudować robota wyposażonego w dwa manipulatory, którego zadaniem będzie wydobycie silnika z zatopionego wraku samolotu. W tym celu robot będzie musiał podpłynąć z całym sprzętem do maszyny i umieścić przy silniku specjalną poduszkę powietrzną, która wyniesie napęd na powierzchnię.
Przed naszymi studentami jednak jeszcze większe wyzwanie – przygotowanie łodzi na zawody robotów podwodnych MATE Competition, które w czerwcu 2018 r. odbędą się w USA. Konstruktorzy muszą zbudować robota wyposażonego w dwa manipulatory, którego zadaniem będzie wydobycie silnika z zatopionego wraku samolotu. W tym celu robot będzie musiał podpłynąć z całym sprzętem do maszyny i umieścić przy silniku specjalną poduszkę powietrzną, która wyniesie napęd na powierzchnię.
– Zdecydowaliśmy się na budowę kompletnie nowego modelu. Chcemy przygotować manipulatory o sześciu stopniach swobody, łódź będzie także wyposażona w siedem kamer – cztery na bocznych ścianach maszyny, żeby było widać co dzieje się wokół, jedną z widokiem na holowany ładunek oraz dwie na manipulatorach, żeby poprawić precyzję wykonywanych czynności – tłumaczył Chmielewski.
Dodatkowo łódź zostanie wyposażona w tzw. aktywny system utrzymywania pozycji, który po dopłynięciu na wyznaczonego miejsca, będzie dostosowywał się m.in. do ruchu wody, utrzymując niezmienną pozycję i ułatwiając tym samym operatorowi manipulowanie chwytakami.
– W przygotowaniu nowej łodzi będziemy musieli wykorzystać całą dotychczas zdobytą wiedzę. Konstrukcja będzie o wiele bardziej zaawansowana niż modele, który budowaliśmy do tej pory. To bardzo duże wyzwanie, ale chcemy się go podjąć – podkreślił Mateusz Zimoch.
W projekt zaangażowanych jest ok. 15 osób, a koszt budowy nowego robota podwodnego to ok. 50 tys. zł. Studenci poszukują obecnie sponsorów, którzy pomogliby im w tym przedsięwzięciu.
 Prestiżowe zawody robotów podwodnych MATE Competition organizuje Marine Advanced Technology Education Center, we współpracy z NASA. Zadania wykonywane są m.in. w największym na świecie basenie, który ma pojemność ponad 23 milionów litrów i głębokość 12 metrów. Oprócz tego zespoły muszą także przygotować raporty techniczne oraz prezentacje swoich projektów. Każdego roku w imprezie startuje ok. 100 drużyn z całego świata. Główną nagrodą w przyszłorocznym konkursie jest kontrakt na budowę robota podwodnego.
Prestiżowe zawody robotów podwodnych MATE Competition organizuje Marine Advanced Technology Education Center, we współpracy z NASA. Zadania wykonywane są m.in. w największym na świecie basenie, który ma pojemność ponad 23 milionów litrów i głębokość 12 metrów. Oprócz tego zespoły muszą także przygotować raporty techniczne oraz prezentacje swoich projektów. Każdego roku w imprezie startuje ok. 100 drużyn z całego świata. Główną nagrodą w przyszłorocznym konkursie jest kontrakt na budowę robota podwodnego.
Koło Naukowe Automatyki i Robotyki „Robocik” działa na Wydziale Mechanicznym PWr od 1997 r. i jest jednym z najstarszych na Politechnice Wrocławskiej. Głównym projektem realizowanym przez studentów jest obecnie projekt łodzi podwodnej, ale konstruują również sortującego robota przemysłowego wykorzystującego sztuczne sieci neuronowe, system wizyjny do pracy, a także model pojazdu autonomicznego.
Koło prowadzi również działalność naukową w ramach programu Zawodowy Dolny Śląsk oraz Akademia Wynalazców im. R Boscha. Zrzesza 47 członków. Opiekunami koła są dr Jacek Ziemba, dr Łukasz Dworzak i dr Marek Kuran.
Więcej informacji na stronie KN Robocik i na profilu organizacji na FB.
mic











Nasze strony internetowe i oparte na nich usługi używają informacji zapisanych w plikach cookies. Korzystając z serwisu wyrażasz zgodę na używanie plików cookies zgodnie z aktualnymi ustawieniami przeglądarki, które możesz zmienić w dowolnej chwili. Ochrona danych osobowych »